|
Biodiversity Information Science and Standards : Conference Abstract
|
|
Corresponding author: Toivo Ylinampa (toivo.ylinampa@gmail.com)
Received: 18 Jun 2019 | Published: 26 Jun 2019
© 2019 Toivo Ylinampa, Hannu Saarenmaa
This is an open access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Ylinampa T, Saarenmaa H (2019) ENTODIG-3D. Biodiversity Information Science and Standards 3: e37473. https://doi.org/10.3897/biss.3.37473
|
|
Abstract
New innovations are needed to speed up digitisation of insect collections. More than one half of all specimens in scientific collections are pinned insects. In Europe this means 500-1,000 million such specimens. Today’s fastest mass-digitisation (i.e., imaging) systems for pinned insects can achieve circa 70 specimens/hour and 500/day by one operator (
The slowness of imaging pinned insects follows from the fact that they are essentially 3D objects. Although butterflies, moths, dragonflies and similar large-winged insects can be prepared (spread) as 2D objects, the fact that the labels are pinned under the insect specimen makes even these samples 3D. In imaging, the labels are often removed manually, which slows down the imaging process. If the need for manual handling of the labels can be skipped, the imaging speed can easily multiplied.
ENTODIG-3D (Fig.
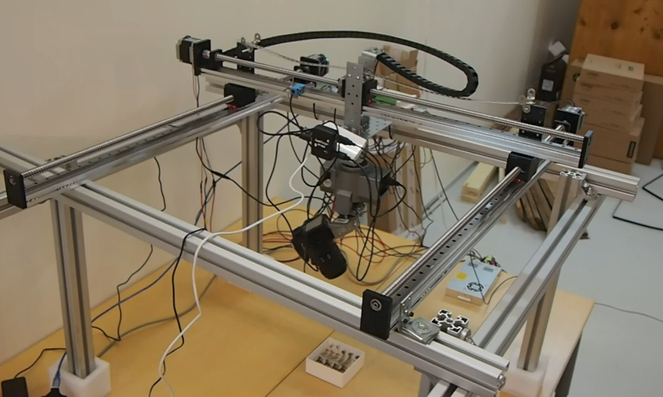
Pictures are transferred into the computer, which calculates a 3D-model with photogrammetry, from which the label text beneath the specimen may be read. This approach requires heavy computation in the segmentation of the top images, and in the creation of a 3D model of the unit, and in extraction of label images of many specimens. Firstly, a sparse point cloud is calculated. Secondly, a dense point cloud is calculated. Finally, a textured mesh is calculated. With machine learning object detection, the top layer, which consists of the insect, may be removed. This leaves the bottom layer with labels visible for later processing by OCR (optical character recognition).
This is a new approach to digitise pinned insects in collections. The physical setup is not expensive. Therefore, many systems could be installed in parallel to work overnight to produce the images of tens of drawers. The setup is not physically demanding for the specimens, as they can be left untouched in the unit or drawer. A digital object is created, consisting of label text, unit or drawer QR-code, specimen coordinates in a drawer with unique identifier, and a top-view photo of the specimen. The drawback of this approach is the heavy computing that is needed to create the 3D-models.
ENTODIG-3D can currently digitise one sample in five minutes, almost without manual work. Theoretically, potentially sustainable rate is approximately one hundred thousand samples per year. The rate is similar as the current insect digitisation system in Helsinki (Tegelberg & al. 2017), but without the need for manual handling of individual specimens. By adding more computing power, the rate may be increased in linear fashion.
Keywords
mass digitization, 3D-imaging, robotics, machine learning object detection
Presenting author
Toivo Ylinampa, Hannu Saarenmaa
Presented at
Biodiversity_Next 2019
References
-
‘From Pilot to production’: Large scale digitisation project at Naturalis Biodiversity Center.ZooKeys209:87‑92. https://doi.org/10.3897/zookeys.209.3609
-
High-performance digitization of natural history collections: Automated imaging lines for herbarium and insect specimens.Taxon63(6):1307‑1313. https://doi.org/10.12705/636.13
-
Mass digitization of individual pinned insects using conveyor-driven imaging.2017 IEEE 13th International Conference on e-Science (e-Science)https://doi.org/10.1109/escience.2017.85